


Robotertische, -zellen & Base Connectoren
Optimale Arbeitsumgebungen für Cobots






Arbeitsumgebungen für Cobots
Je nach Einsatzzweck und -ort braucht man für den kollaborierenden Roboter eine passende Arbeitsumgebung. Ob frei an einer Maschine stehend oder in einer Roboterzelle eingehaust, mit unseren standardisierten Gestellen können wir flexible und kostengünstige Lösungen anbieten.
Hochwertig gefertigt und flexibel
Unsere Gestelle sind aus unserem Alu-Profilsystem gefertigt und kompatibel zu item und Bosch Profilen.
Die Montage von Werkzeugen und weiterer Automatisierungstechnik auf der durchgehenden T-Nutenplatte ist beliebig möglich.
Planung der technischen Umsetzung
Anfangs steht die technische Umsetzung der einzelnen Prozesse im Vordergrund. Was soll automatisiert werden und welches Werkzeug, bzw. welche Robotergreifer benötigt der kollaborierende Roboter?
Soll der Roboter von Universal Robots für eine Aufgabe oder flexibel eingesetzt werden?
Soll der Cobot bestehende Tätigkeiten von Mitarbeitern übernehmen oder ist ein zusätzlicher Grad der Automatisierung geplant?
Dazu können beispielsweise in der Roboterzelle, die Materialzufuhr und weitere Vorrichtungen individuell montiert und erweitert werden. Der Roboterfuss dagegen ist für schon vorhandene, monotone Tätigkeiten geeignet, bei dem der verfügbare Platz eingeschränkt ist.
Richtige Taktzeit ist wichtig
Ist die Umsetzung geklärt, dann sollten Aspekte der Taktzeit oder Stückzahl betrachtet werden. Welcher Durchsatz pro Stunde ist das Ziel? Mit dem Aufaddieren der einzelnen Prozesszeiten ohne Betrachtung der Roboterbewegungen, erhält man die minimale Taktzeit der Automation. Inwieweit der Cobot den tatsächlichen Wert beeinflusst, hängt stark von den Tätigkeiten ab und kann mit den technischen Daten der Cobots grob abgeschätzt werden. Man darf aber nicht vergessen, dass auch für die Cobots von Universal Robots die physikalischen Gesetzte gelten!
Das Beschleunigen und Verzögern von Massen ist immer mit Zeit verbunden. Für eine genaue Abschätzung der Taktzeit kann zum Beispiel die Software Artiminds verwendet werden. Hiermit wird der Arbeitsprozess des Universal Robots in einer 3D-Umgebung programmiert und visualisiert.
Gesetzliche Anforderungen
Eine Robotik-Anwendung, die man auf Taktzeit optimiert, ist meist mit der Notwendigkeit einer Einhausung verknüpft. Je schneller sich der kollaborative Roboter bewegen soll, umso höher ist die kinetische Energie, die er bei einer Kollision mit einem Menschen ausübt. Die zulässigen Kräfte sind in der ISO TS 15066 festgeschrieben und beeinflussen maßgeblich die Mensch-Roboter-Kollaboration. Ebenso müssen vorhandene Gefahren, wie Quetschstellen oder Scherungen mit einer Risikobeurteilung bewertet werden.
Wenn der Cobot ausreichend Zeit für seine Arbeitsschritte hat und die Anwendung keine weiteren Gefahrenstellen aufweist, kann auf eine Abtrennung der Arbeitsbereiche verzichtet werden. Mit den 17 Sicherheitsfunktionen, die die Universal Robots bieten, können sichere Einstellungen getroffen werden, um die gesetzlichen Vorgaben für eine Mensch-Roboter-Kollaboration (MRK) einhalten zu können.
Auch der Einsatz zusätzlicher Sicherheitstechnik, wie Trittschutzmatten oder Flächenscanner, ermöglicht einen kooperativen Betrieb. Hierbei bremst der Cobot ab oder bleibt stehen, wenn sich eine Person im Arbeitsbereich befindet.
Roboterfuß
Soll der kollaborierende Roboter möglichst wenig in seinen Bewegungen eingeschränkt sein und falls wenig Arbeitsfläche vorhanden ist, so ist ein Roboterfuß von J+K die perfekte Lösung.
Mit optionalen Rädern und einer Andockvorrichtung ausgestattet, kann das Gestell schnell und positioniersicher platziert werden.
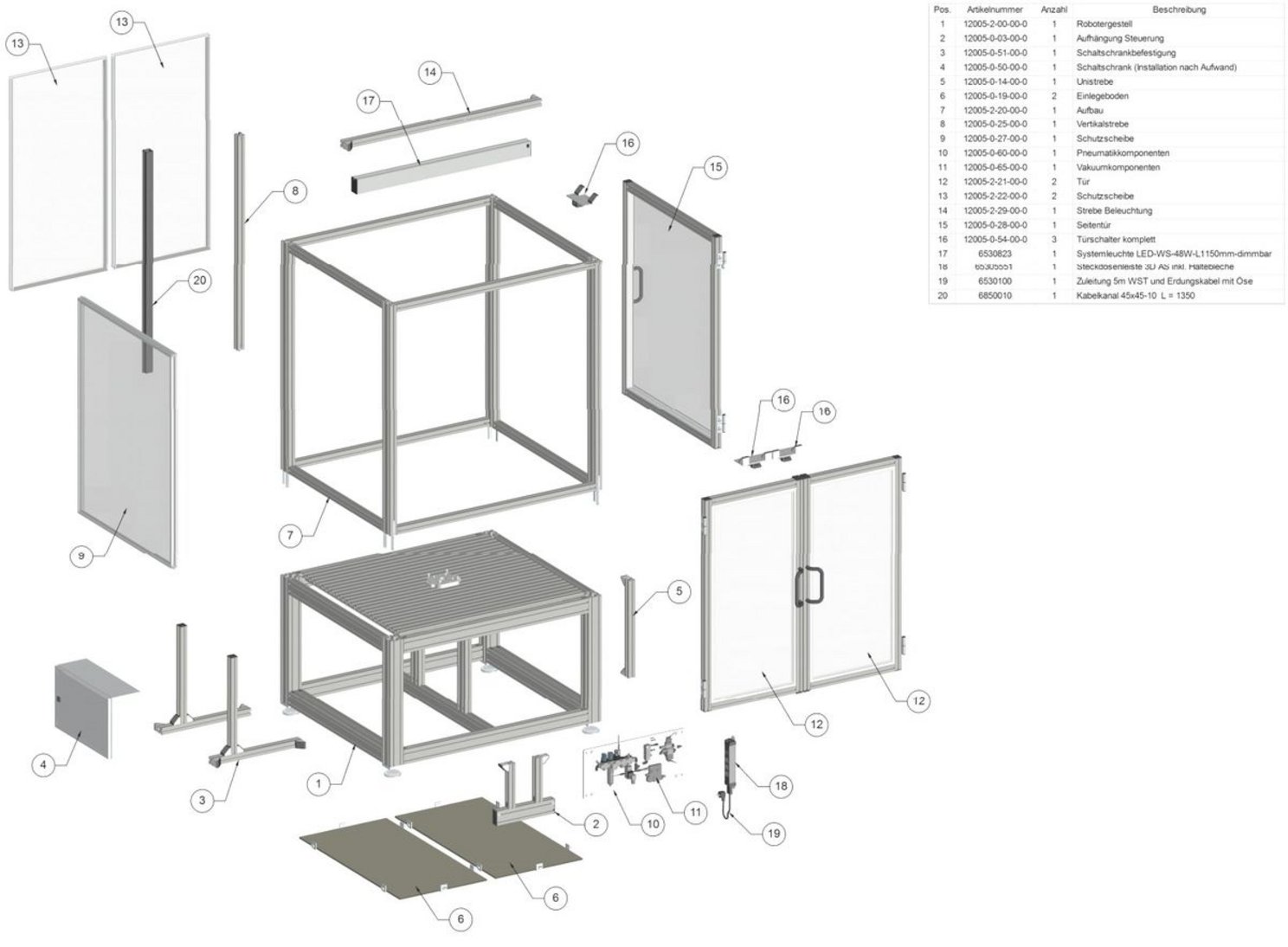
Roboterzelle & Robotertisch
Mit Roboterzelle oder -tisch kann der Arbeitsbereich des Cobots individuell gestaltet werden.
Das verbaute Aluminiumprofil und die T-Nutenplatte ermöglichen eine sehr flexible Positionierung des Roboters, der Materialzufuhr und weiterer Bearbeitungsvorrichtungen.
Die Baugrößen der Roboterzellen/-tische sind modular aufgebaut und können beliebig kombiniert werden.
Base Connectoren
Ein Base Connector ermöglicht das schnelle Umrüsten und Umsetzen des Universal Robots Cobots.
So wird die Schnittstelle standardisiert und jegliche Werkzeuge lassen sich innerhalb weniger Sekunden verbinden und trennen.